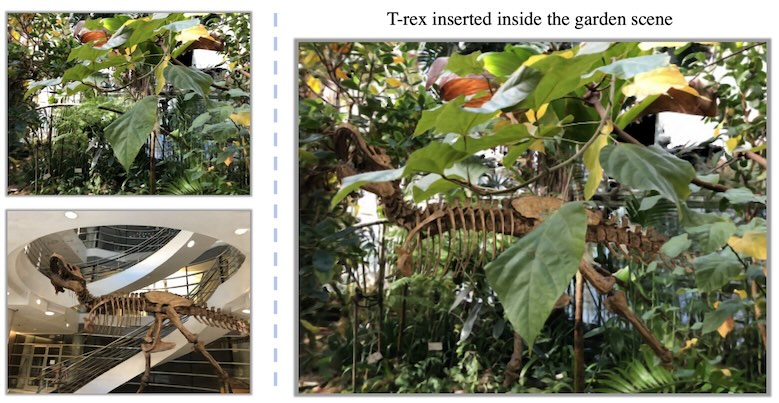
We present a novel method for performing flexible, 3D-aware image content manipulation while enabling high-quality novel view synthesis. While NeRF-based approaches are effective for novel view synthesis, such models memorize the radiance for every point in a scene within a neural network. Since these models are scene-specific and lack a 3D scene representation, classical editing such as shape manipulation, or combining scenes is not possible. Hence, editing and combining NeRF-based scenes has not been demonstrated. With the aim of obtaining interpretable and controllable scene representations, our model couples learnt scene-specific feature volumes with a scene agnostic neural rendering network. With this hybrid representation, we decouple neural rendering from scene-specific geometry and appearance. We can generalize to novel scenes by optimizing only the scene-specific 3D feature representation, while keeping the parameters of the rendering network fixed. The rendering function learnt during the initial training stage can thus be easily applied to new scenes, making our approach more flexible. More importantly, since the feature volumes are independent of the rendering model, we can manipulate and combine scenes by editing their corresponding feature volumes. The edited volume can then be plugged into the rendering model to synthesize high-quality novel views. We demonstrate various scene manipulations, including mixing scenes, deforming objects and inserting objects into scenes, while still producing photo-realistic results.
Back